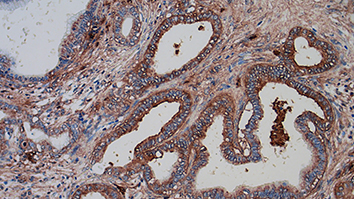
SRI的靶向抗原负载脂质体(TALL)是一种扩大免疫疗法(如检查点抑制剂)益处的治疗方法,已被美国联邦药品管理局(FDA)授予胰腺导管腺癌(PDAC)的孤儿药物指定(ODD)。,因此,SRI未来的战略合作伙伴可以获得合格临床试验的税收抵免,并有可能在药物获批后的七年内获得市场排他性,以及其他好处。
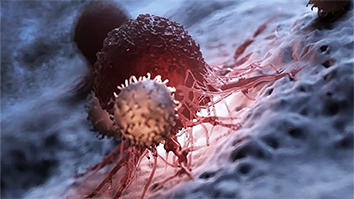
N4 Pharma是开发Nuvec®的专业制药公司,这是一种新型递送系统,旨在携带将被开发为癌症治疗和疫苗的核苷酸。该公司已与SRI签订研究协议,将Nuvec与SRl专有的FOX Three Molecular Guidance system™(MGS)相结合,目的是共同营销该组合技术。,这两家公司将合作进行研究,将SRl的MGS系统与Nuvec偶联,以增加对特定细胞的细胞内递送。在合并技术的支持下,N4 Pharma和SRI将开发和追求新的商业机会。
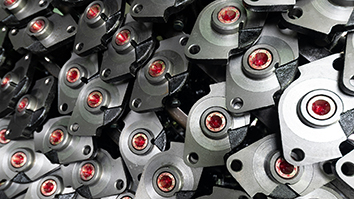
SRI已被美国国防高级研究计划局(DARPA)选中,为其最近启动的铝合金结构多目标工程和测试(METALS)计划提供先进技术。,DARPA METALS的目标是打破当今每部件一种材料的模式,当高度工程化的部件经历严峻的环境时,这种模式可能会导致脆弱性和寿命缩短。这项为期四年的计划的目标是开发技术,将材料选择——尤其是金属合金——视为设计中的一个连续变量,可以在单个零件上进行定制。

地球海洋的表面积约为1.4亿平方英里,浩瀚的海洋很难传达,但作为一个参考点,考虑一下将海洋覆盖起来所需的面积几乎是美国陆地的50倍。考虑到浩瀚的海洋,海洋中发生的大部分事情仍然未知。,为了帮助民间研究人员、商业实体和政府了解海洋事件,SRI研究人员创造了一种新型的海洋漂流者。被称为“持续环境意识报告和定位”(PEARL)漂流器,数千台此类设备被部署到遥远的地方,获取大量有用的数据并发送回岸边。通过形成一个庞大的覆盖网络,珍珠漂流者可以在海洋大海捞针,增强环境监测和国家安全方面的众多应用。

自新冠肺炎以来,许多学院和大学都扩大了虚拟学习,但研究表明,在线学习在不同的学生群体中效果并不一样好。事实上,它会导致通过率降低,增加孤立感,并加剧现有的不平等。,SRI数字学习与技术政策项目联合主任、高级首席研究员Rebecca Griffiths表示:“研究表明,学生在在线课程中的成功率通常会降低,这表明不同群体之间的差距有时会变得更大。鉴于未来教育的极端变化,如何在虚拟教育环境中改进和创新变得越来越重要。”

我们说话的方式可以揭示我们的心理和情绪健康。抑郁、创伤后压力或自杀的迹象可以表现在我们使用的词语和语气中,我们如何表达自己的想法,甚至我们的声音经过颈部和喉咙的压力肌肉时的声音。,SRI的研究人员一直在开发一种人工智能工具,可以帮助分析声音和评估一个人的精神状态。该工具可以为临床医生提供更多的诊断信息,并使其更容易筛查通常难以接触到的人,例如部署在军队中的人。

SRI和Lisa Health今天发表了一项研究,揭示了更年期女性在工作中面临的挑战和需求。这项工作在国际妇女节上备受关注,它突出了工作场所包容性这一经常被忽视的方面,特别是更年期如何影响女性的职业生涯和福祉。Lisa Health于2020年脱离SRI,为女性创建技术解决方案。,Lisa Health联合创始人兼首席科学官、SRI高级研究员Massimiliano de Zambotti博士表示:“在理想的工作场所措施(如正式的更年期政策、管理培训和数字解决方案)及其实施之间存在显著差距。研究结果强调,迫切需要提高认识和进行结构变革,以更好地支持更年期女性。应对这些挑战可以增强性别公平,有助于员工的整体福祉。”


人们在这里谈论科学。人们谈论不同的发明。人们谈论不同的创新。他们谈论诺贝尔奖获得者。他们谈论他们的发明和技术。人们谈论日常生活中正在发生的新创业公司。,SRI改变了我的想法,如何看待技术。我来自一个完全不同的环境。
